从测试过程中华为P6的表现以及报告中的数据我们可以看到:
加速度传感器:校正尚可,噪声程度一般。
陀螺仪:校正良好,噪声太大。
电磁罗盘:表现一般,无功无过。
姿态解算:偏差奇大,是此次测评中最差的一款。

华为P6传感器测试
从测试过程中华为P6的表现以及报告中的数据我们可以看到:
加速度传感器:校正尚可,噪声程度一般。
陀螺仪:校正良好,噪声太大。
电磁罗盘:表现一般,无功无过。
姿态解算:偏差奇大,是此次测评中最差的一款。
首先测试的是加速度传感器,将手机放置在量具级别的测试平台上,保持一切静止没有外界的震动干扰,采集10秒钟的静置数据。

停止采集后我们可以看到,屏幕上面有三条线:蓝线、绿线和红线。三条线分别代表了加速度传感器在x、y、z三个轴上的输出,其中蓝色的线高一点,因为手机现在处于水平静置,所以这条线应该在1g附近,数值大约为10m/s2(典型值应为1g=9.81 m/s2)。再将数据放大到噪声可以目测的程度,进行目测读数和截屏。报告显示华为P6读z轴上的数值为-9.82 m/s2,噪声级别为±0.03 m/s2。对于偏置均值水平和噪声级别的比较我们将会在系列评测完成之后,进行横向对比。

再次采样获得x轴和y轴的数据,也就是红线和绿线。将噪声曲线放大,x轴的均值为0.05 m/s2,y轴的均值为0.325 m/s2,噪声的波峰值x轴在±0.03 m/s2之间,y轴在±0.025 m/s2之间,噪声处于中等程度。
下一步我们要对华为P6加速度传感器的幅值进行评估,来看它是否能测量出足够大的冲击和动态。原则上说量程越大越好。量程太小传感器无法测试出比较大的动态、动作和行为,我们采用的方法是:开始采集后用很大的力量晃动手机,得到几秒钟的采样数据。

我们采集了大约3秒钟大动态数据,从屏幕上可以看到,三个轴的数据基本饱和。对这一数据进行读数,加速度传感器x、y、z轴的峰值都是接近20 m/s2 (约2g,两倍重力加速度),测量报告显示,华为P6加速度传感器在x、y、z轴上的真实动态量程确为±20 m/s2,已经及格。
我们再来测试陀螺仪传感器的性能。陀螺仪的测试数据是空间角速度。测试静置时陀螺仪的读数,原则上静置时三个轴的读数都应该在“0”附近。我们将手机静置在测量台上,采集10秒钟的数据。
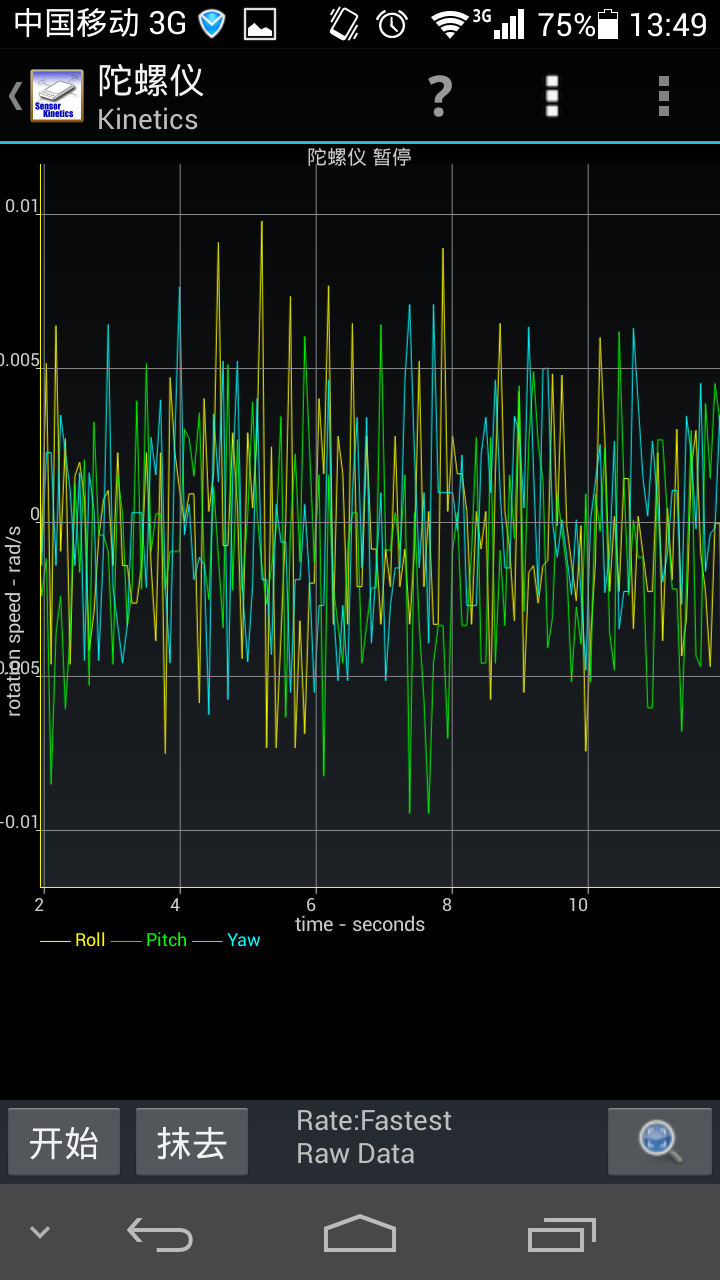
对三个轴的数据进行解读,在报告中我们可以看到精确数值。华为P6的陀螺仪校正情况很好,x、y、z三个轴的静态输出偏置均为0 rad/s。噪声方面,华为P6 x轴和y轴的噪声级别为0.018 rad/s,z轴静态输出偏置0.013 rad/s,噪声偏大。
接下来对华为P6的陀螺仪的量程进行评估,我们用很大的幅度晃动手机,来看它的陀螺仪的量程是否能超出一般动作的幅度。

用相对较大的动态对陀螺仪的数据进行测量后,可以看到其动态量程较大,大概在40rad/s左右。在报告中我们可以看到,华为P6的量程为40 rad/s(约合3200dps),足够日常使用。
首先我们对电磁罗盘的数据的稳定程度和噪声级别进行测试。
静置采集数据后截屏。放大看它的波动和锯齿,华为P6在电磁罗盘方面的表现较差。

和之前对加速度传感器读数方式的相同,红、黄、绿线分别代表x、y、z轴上华为P6电磁罗盘静态输出噪声级别。对截屏进行读数,x轴、y轴、z轴均为1 μT,情况较好。
除了对刚才的三个原生传感器的性能测量之外,我们还要进行另外一个测量——姿态解算。

首先对姿态解算精度进行水平测量。由于软件及传感器采用四元数表示其角度,难以直观比较,我们将其换算为更直观的欧拉角。本次评测的姿态解算静态精度评估分成两步,首先进行水平静置测量。用于对比的高精度姿态传感器(该IMU由诺亦腾科技提供)的读数为Pitch 0.03°,而华为P6的水平倾角读数经过换算得出水平倾角为Pitch-7.3°,偏差为7.33°。偏差数值之大令人啧舌,是本次测试中最差的一款手机。

第二步测量为定倾角测量,用于对比的高精度姿态传感器(该IMU由诺亦腾科技提供)的读数为Pitch -36°,而华为P6的读数经过换算得出的水平倾角为Pitch-42.2°。可以观察到华为P6在姿态解算上存在6.2°的偏差,同样是个令人震惊的大数字。


